|
1.Throwing design for high hit probability
Accurate initila positioning of a robot has difficulty even though a jig
or initial positioning sensor is utilized. Because of this error, the robot
motion has difference with the reference motion.
- An incremental encorder is often used for angle sensor of the joint. Because
its zero positioning is executed based on the initila position of the robot,
the inital error of the robot positioning can not be compensated by any
controller.
- In case of dynamic motion typified by throwing by the manipulator, it is
difficult to estimate the infulence of the inital error to the landing
point of the object.
In this research, robot dynamics is linearized and discretized along the reference motion, and sensitivity of the landing point with respect to initial error is calcurated.
Consider a robot dynamics represented by:

It is assumed that the reference trajectory and input are given as:
 , , 
A linearized dynamics on the specified point is given by:

By a recursive calcuration, the final state is given by:

Based on this equation, the sensitivity of the final state with respect to the inital error is obtaind by:

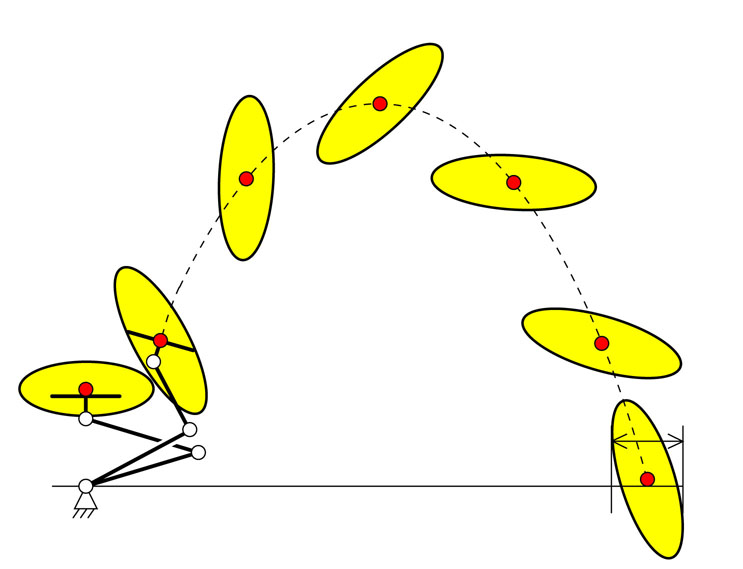
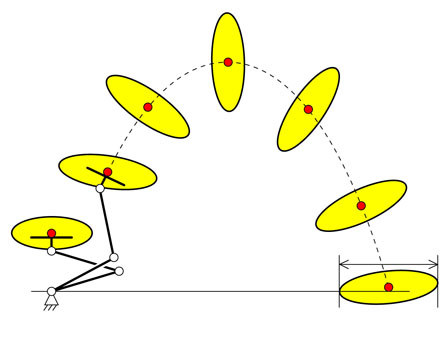
Figure 1 shows simulation results of throwing with low sensitivity (left) and high sensitivity (right).
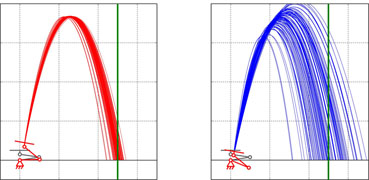 |
| Figure 1 Throwing simulation |
Randum inital errors are set and dynamic simulations are executed (2000 times). This resules show that the hit probability gets largh by the robust motion with low sensitivity. |