|
1.命中率を高める投擲運動
ロボットの初期姿勢の設定は難しく,治具や初期姿勢設定センサを用いても誤差が生まれます.この誤差のために,ロボットの運動は目標のものとずれます.
- 一般に,角度センサにはエンコーダが用いられ,初期姿勢によってその零点を設定しますので,初期姿勢がずれていてもそこを零点としてしまうためロボットは自分がずれていることを認識できません.
- 特に投擲のように運動が動的な場合,この誤差が着地点にどの程度の影響を与えるかを見積もることは簡単ではありません.
本研究では,ロボットの運動方程式を目標の投擲軌道まわりで線形化・離散化し,初期誤差に関する着地点の誤差,すなわち,感度を求め,これを最小化する運動を求めます.
ロボットの運動方程式を

とし,運動の目標軌道を
 , ,
とします.また,各点まわりで運動方程式を線形化・離散化し,

を得ます. これを漸化的に解いて,

となるので,初期値の誤差に対する感度は

で求めることができます.
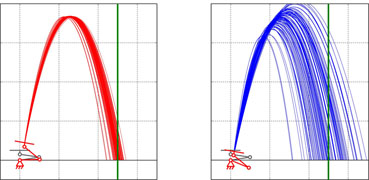 |
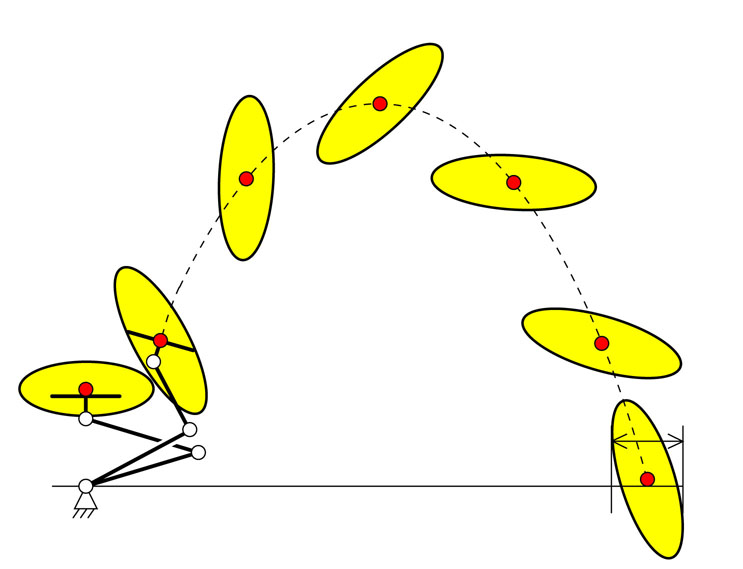
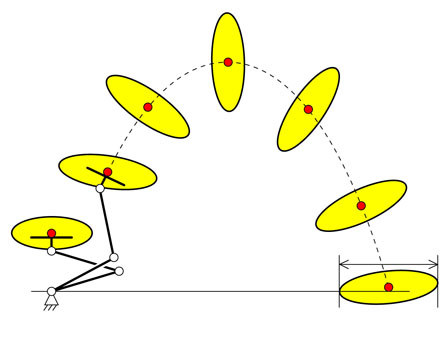
| 図1 投擲シミュレーション |
図1は感度の小さい軌道と大きい軌道で同じ初期誤差を与えたときのシミュレーション結果を表しています(2000回のシミュレーション).この結果から,感度の小さな投擲をすることで,命中率が高くなることが分かります.
|