![]()
Control system design based on orbit attractor
![]()
|
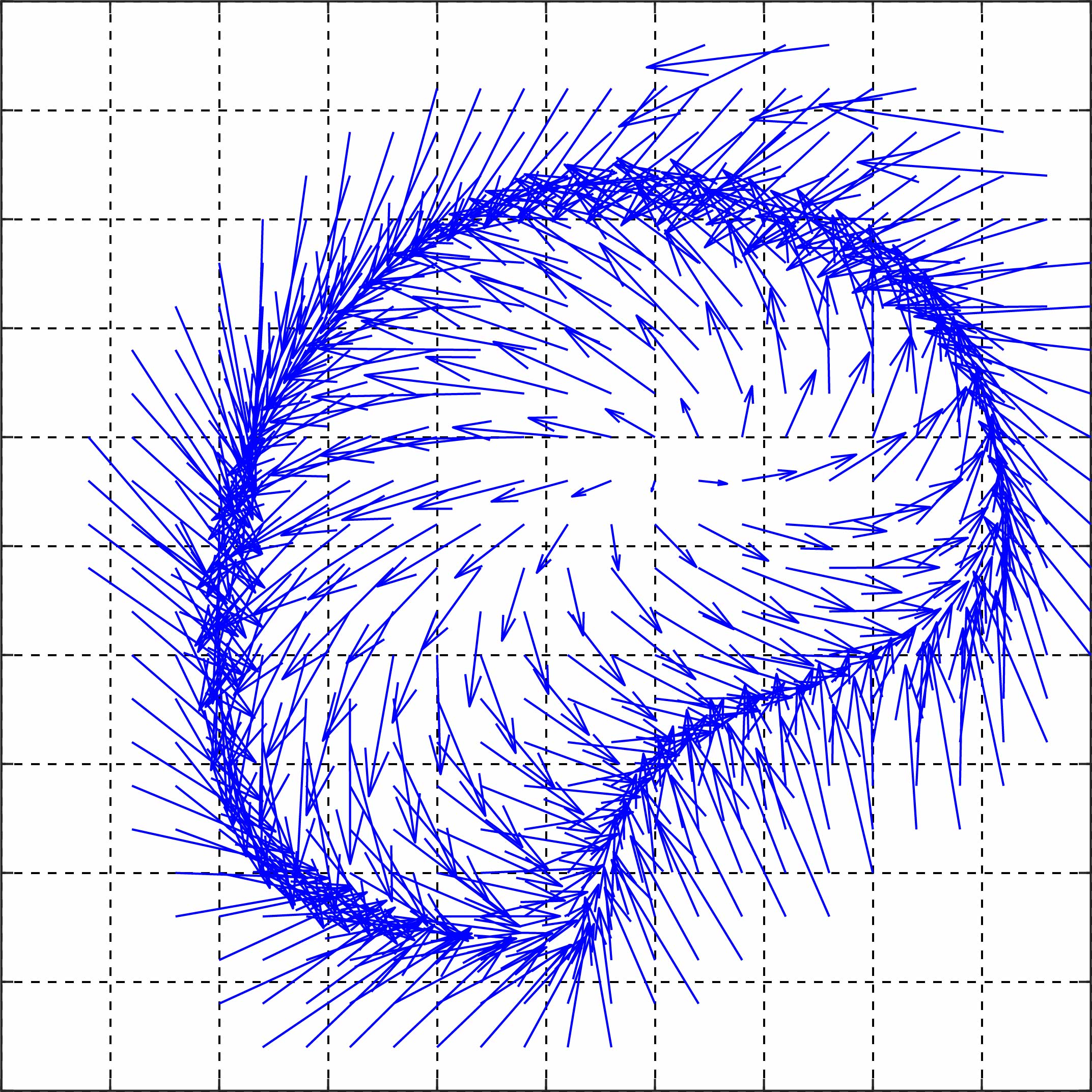
What is attractor? A system evolving in time is called a dynamical system, and it is represented by a differential equation in continuous time domain as; The state valiable xk+1 in time k+1 is decided from the current value of xk. Even though the motion of x is changed by the external force, it continues its motion, which means the motion of x does not have time constraint. This is because the attractor based controller is suitable for human-machine collaborative control. |
![]()
|
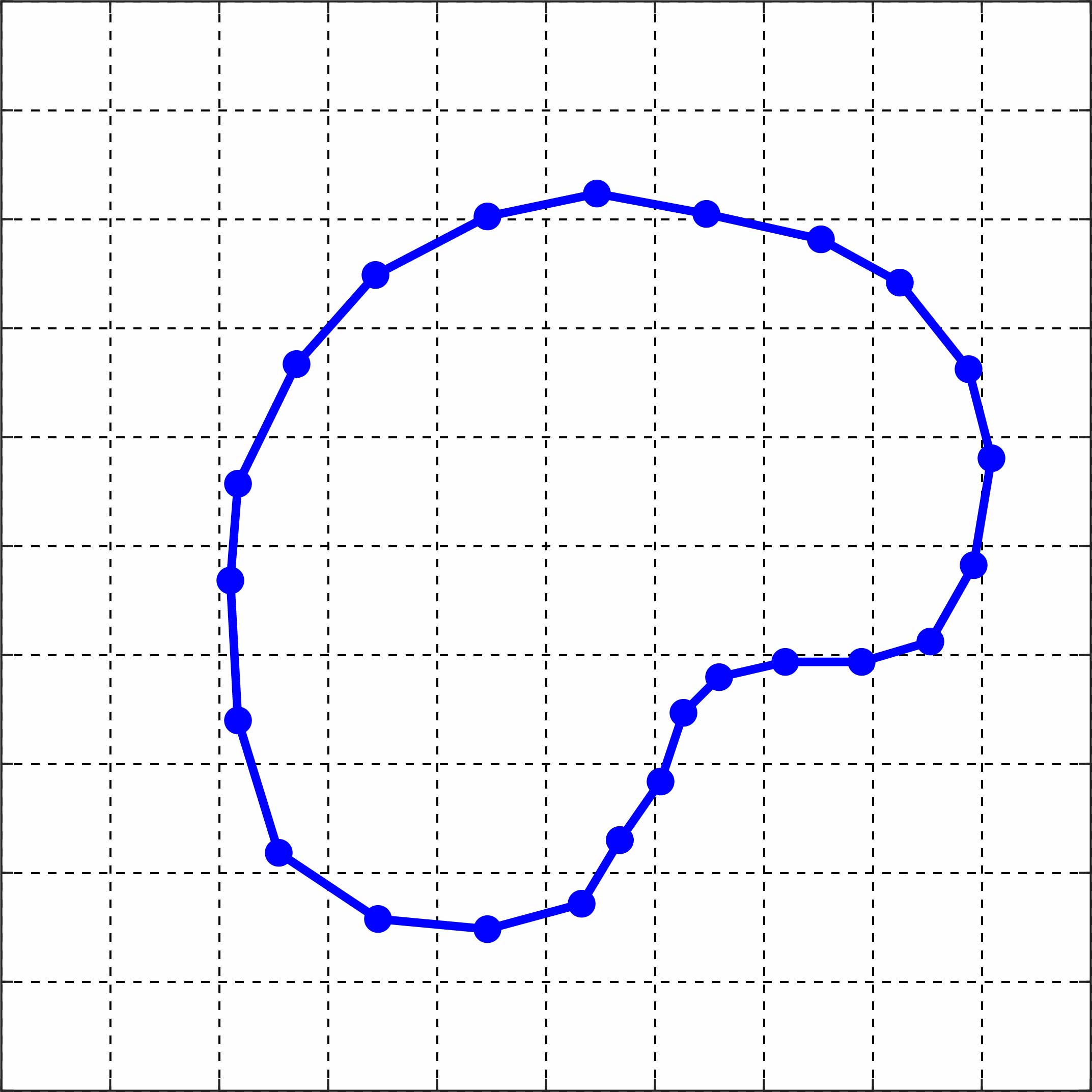
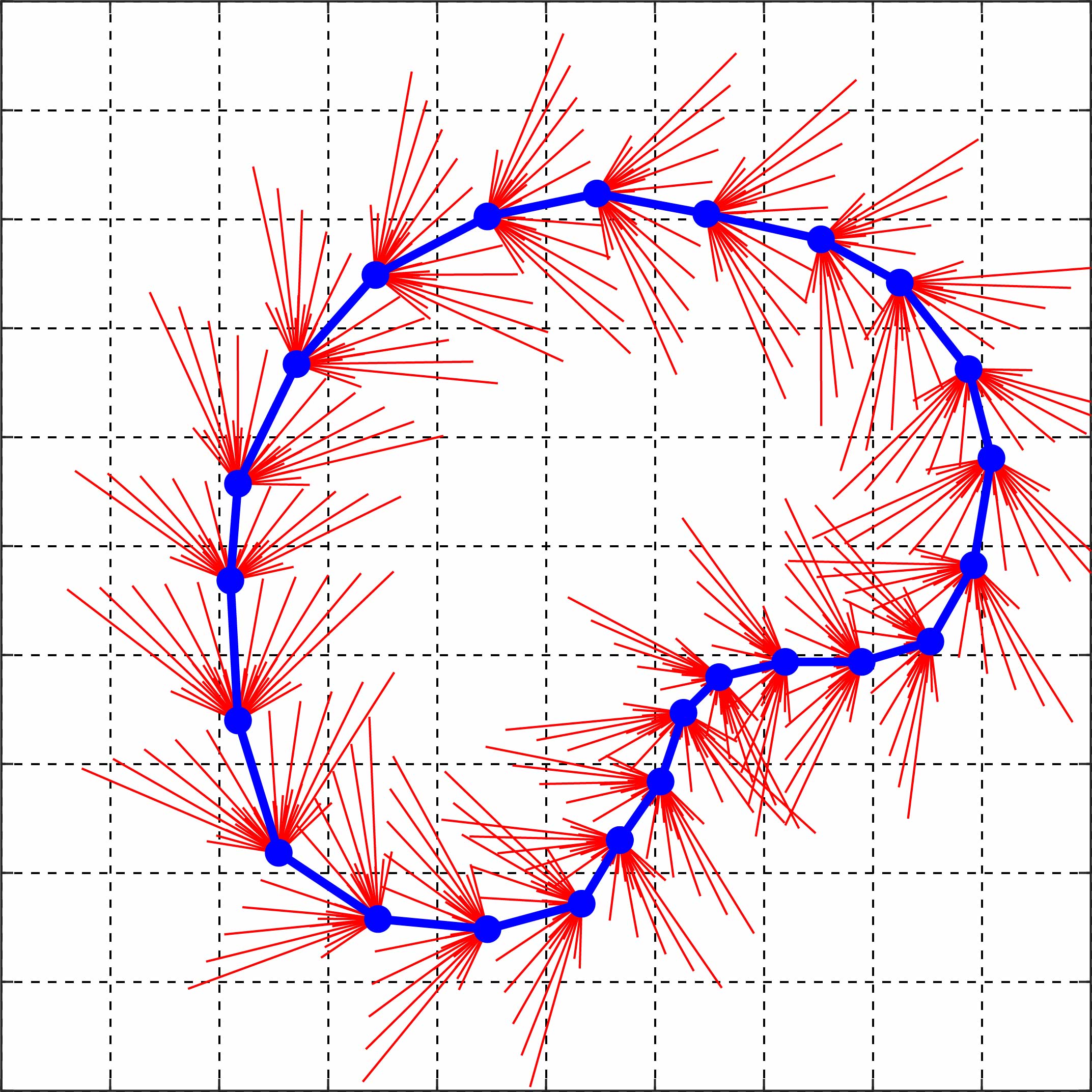
1. Dynamics design via a functional approximation of vector field Set the reference orbit.
|